ubuntu18.04_realsense
ubuntu18.04 +realsence-sdk安装
[toc]
环境:
- 系统:ubuntu18.04
- 工控机:Nodka 工控机(NP-6122)
1. 更新ubuntu:
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade2. 下载最新的librealsense SDK:
git clone https://github.com/IntelRealSense/librealsense.git
注意:安装时,不要将相机连在电脑上。
3. 安装必要的依赖
1 | cd ~/librealsense |
4. 安装 librealsense原文件目录下的许可脚本
1 | cd ~/librealsense |
5. 编译librealsense
1 | cd ~/librealsense |
6. 安装librealsense-SDK
sudo make uninstall && make clean && make && sudo make install
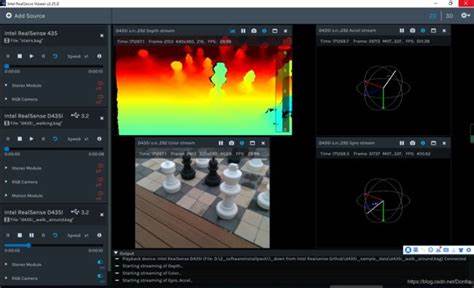
7. 连接相机至电脑USB3.0接口并打开摄像头显示界面
realsense-viewer
注意:连接相机的数据线必须是USB3.0的数据线(USB口内为蓝色)
8. 在界面安装适配的相机Firmware(界面会有提示)
ubuntu18.04 +librealsense2-ROS 安装
1. 构建ROS工作空间
1 | mkdir -p realsense_rosws/src #realsense_rows 自己命名的工程文件名,可改,本教程是在home路 径下建立 |
2. 下载realsense-ros
git clone https://github.com/IntelRealSense/realsense-ros.git
3. 编译安装
1 | cd realsense_rosws #返回该文件目录 |
4. 安装rgbd-launch 包
sudo apt-get install ros-melodic-rgbd-launch
5.运行
1 | roscore #新开一个终端 |
6. realsense-ros配置
- 左上角Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link
- 点击该框中的Add -> 上方点击 By topic -> /depth_registered 下的 /points 下的/PointCloud2
- 点击该框中的Add -> 上方点击 By topic -> /color 下的 /image_raw 下的image
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Mr.chen Blog!
评论